UAV Manufacturers · Software
Cockpit FFS runtimes are the wrong category; your operator lives at the GCS.
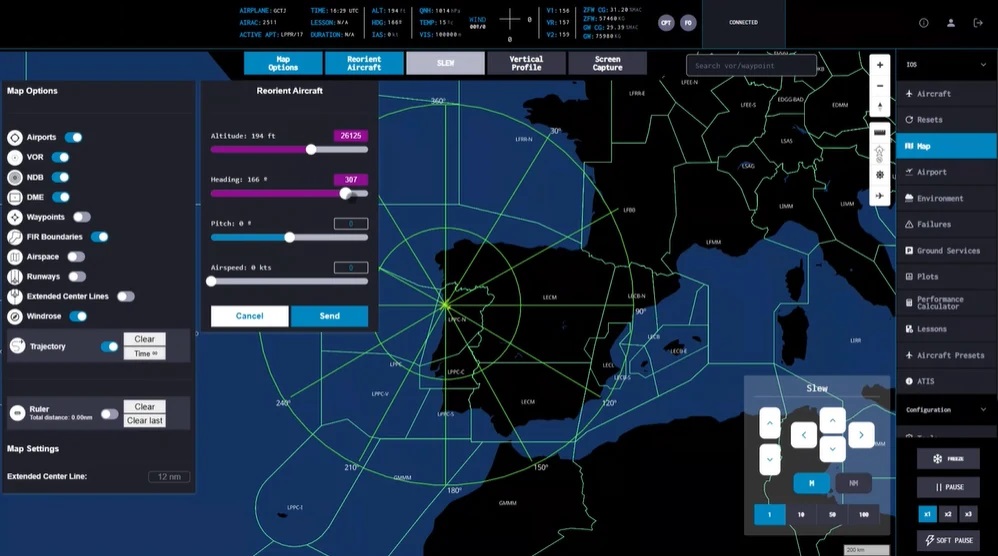
simulation software without a baked-in cockpit assumption; first layer of the open four-layer stack: dynamics and IOS shaped for datalinks, payloads, and mission rehearsal, coupled to the Ground Control Station your crews actually operate
Flight profiles, failures, and instructor scenarios developed in-house alongside configurable GCS interfaces and electronics integration; so operator proficiency tracks the non-standard avionics and export-controlled paths UAV discovery names, and architecture decisions stay ahead of EASA's evolving UAV training narrative instead of waiting for a Tier 1 vendor to adapt a narrow-body product you never flew.
Discuss Your Requirements
Force-fitting cockpit workflows trains the wrong skills; and burns programme time.
Stick-and-rudder UX and ARINC-centric glass do not model datalink drops, payload tasking, or degraded autonomy modes. Instructors end up verbalising gaps the executable does not represent; negative transfer the UAV buyer measures in readiness, not slide decks.
When simulation depends on networked third-party services, air-gapped and export-controlled deployments fail qualification before they start. UAV discovery positions offline and on-prem operation as baseline, not an edge case negotiation.
EASA's UAV framework is still forming; the prompter treats that as a reason to own architecture now. Waiting for a standard product mapped to someone else's roadmap leaves operators without credited training when national rules harden.
Open simulation core; adaptable airframe, GCS-first flows, same team as metal and buses.
VOA's software pillar delivers the adaptable engine and operator-facing IOS the UAV pitch describes: dynamics and systems aligned to your flight and telemetry data, mission rehearsal and degraded modes your instructors need, and structures that feed validation documentation for EASA and national contexts; engineered with the same organisation that builds configurable GCS-facing hardware and in-house electronics so HIL truth and executable behaviour stay one thread.
Non-cockpit flight profiles and vehicle models tuned with your datasets; flexible architecture the proof narrative cites for unmanned platforms
GCS-centric IOS: datalink, payload, and autonomy-edge scenarios without forcing airline UX metaphors onto your operators
Hardware-in-the-loop coupling as design input; training targets the interfaces crews manipulate, not a keyboard mock-up of a jet
On-prem friendly execution; no mandatory foreign cloud bridge for runtime, consistent with classified and export-controlled discovery paths
Customisation track: add your UAV type as a module when infrastructure exists; engagement scoped like platform development vs. engineering add-on in the prompter
Proof alignment: ARINC 429 / AFDX-capable in-house stack narrative extends to software that consumes bus truth your electronics layer exposes